At CogSci 2020, Mark Ho, Fred Callaway, Tom Griffiths and I presented research modeling how and why people decompose tasks into smaller tasks that make it easier to plan. Check out the preprint.
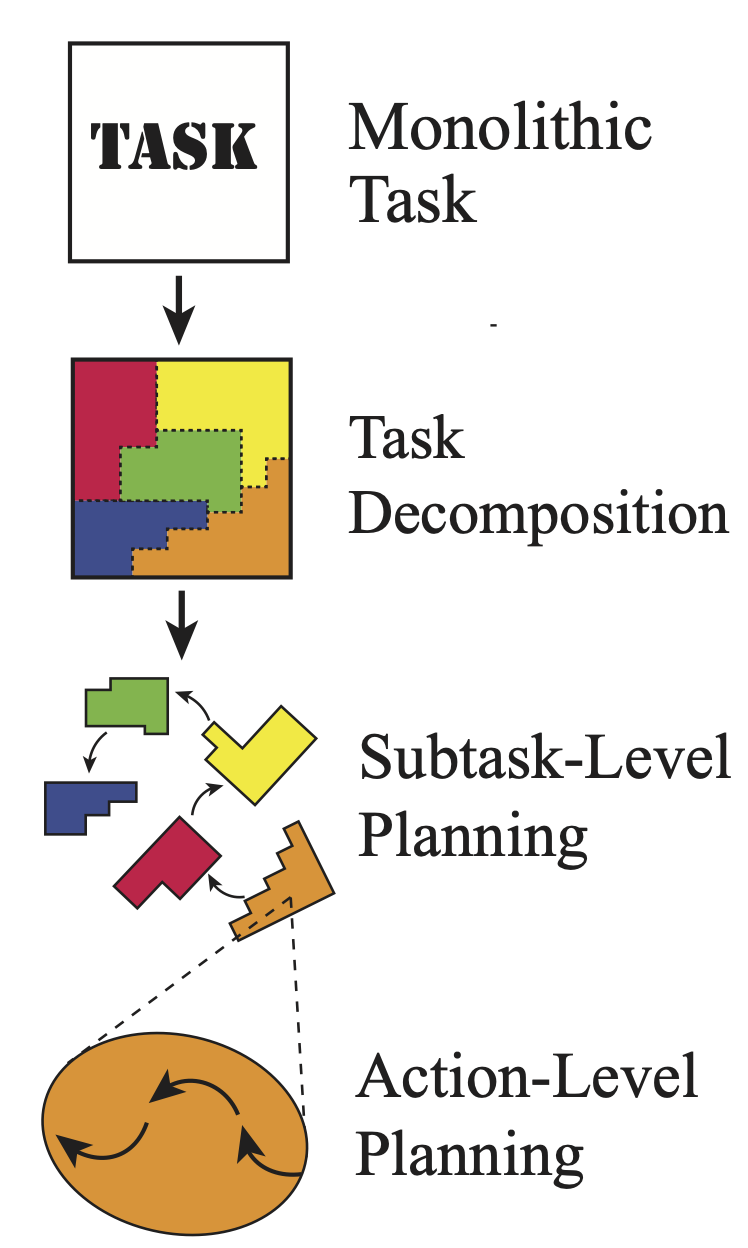
When planning towards a goal (say, cooking a lovely dinner) we often break it down into subgoals (choosing recipes, going shopping, etc). How and why do we choose these subgoals?
We formulate subgoal discovery as a resource-rational representation problem: Construct subgoals that make progress towards goals and are also easy to plan with. Critically, we model how a planning algorithm interacts with a planning representation like a subgoal.
By characterizing how algorithmic costs shape representations, our account provides insight into how people efficiently engage in model-based planning.
At left is an interactive demo showing how the effective choice of a subgoal can dramatically reduce the number of steps a search algorithm must take. It shows how different search algorithms plan when figuring out a path from the green to the yellow square. At top, the algorithm is simply trying find a path. At bottom, the algorthm first plans to reach a subgoal (in blue).
Modify the grid to try out other configurations. Add walls by clicking on squares in the top half. Change the start, subgoal, or goal by dragging them in the bottom half.
This demo is heavily inspired by Introduction to the A* Algorithm, a post by Red Blob Games.